Week 4. Mobile/Edge AI.
Train a computer with own data:
https://teachablemachine.withgoogle.com/
Code
tflocal-env
classify_cables.py
# Based on copyright 2019 Google LLC # Modifications for custom TF model classification via OpenCV camera. By TBL, 2020 #/_________________________________________________________________ import argparse import collections import common import cv2 import numpy as np import os import re import tflite_runtime.interpreter as tflite from tkinter import * from PIL import ImageTk, Image from collections import deque import io import operator import time #/_________________________________________________________________ # Function to start video: frame-by-frame capture & show classification def show_frame(): ret, frame = cap.read() # if read incorrectly if not ret: quit() ## each frame cv2_im = frame # in OpenCV the order of channels is BGR # in contrast for PIL library, whivh is RGB cv2_im_rgb = cv2.cvtColor(cv2_im, cv2.COLOR_BGR2RGB) # gets array, returns image object pil_im = Image.fromarray(cv2_im_rgb) # Tensorflow interpreter common.input_tensor(interpreter)[:,:] = pil_im.resize((common.input_image_size(interpreter)[0:2]), Image.NEAREST) interpreter.invoke() results = get_output(interpreter, top_k=3, score_threshold=0) # update image in GUI with a new frame imgtk = ImageTk.PhotoImage(image=pil_im) lmain.imgtk = imgtk lmain.configure(image=imgtk) res_text = "" # update classification results text in GUI for result in results: res_text += '\n{:.0f}% {}'.format(100*result[1], labels[result[0]]) print(res_text) textVar.set(res_text) # 10 msec pause with next frame lmain.after(10, show_frame) # Function to stop video def stop_frame(): cap.release() # Function to get classification score def get_output(interpreter, top_k, score_threshold): """Returns no more than top_k categories with score >= score_threshold.""" scores = common.output_tensor(interpreter, 0) categories = [ Category(i, scores[i]) for i in np.argpartition(scores, -top_k)[-top_k:] if scores[i] >= score_threshold ] return sorted(categories, key=operator.itemgetter(1), reverse=True) #/_________________________________________________________________ # Layout window=Tk() window.title('Cable classifier') window.geometry("800x800+10+10") # buttons btn_start=Button(window, text="Start video", command=show_frame, fg='green') btn_start.place(x=300, y=50) btn_start=Button(window, text="Stop video", command=stop_frame, fg='red') btn_start.place(x=450, y=50) # results text textVar = StringVar() textVar.set("") lblval=Label(window, textvariable=textVar, fg='black', font=("Helvetica", 20)) lblval.place(x=350, y=600) # Image lmain = Label(window) lmain.place(x=80, y=120) # declaring custom tflite model file and its labels Category = collections.namedtuple('Category', ['id', 'score']) default_model_dir = './CustomCableModel' default_model = 'model_edgetpu.tflite' default_labels = 'labels.txt' parser = argparse.ArgumentParser() parser.add_argument('--model', help='.tflite model path', default=os.path.join(default_model_dir,default_model)) parser.add_argument('--labels', help='label file path', default=os.path.join(default_model_dir, default_labels)) parser.add_argument('--camera_idx', type=int, help='Index of which video source to use. ', default = 0) args = parser.parse_args() # tensor allocations for TF interpreter with open(args.labels, 'r') as f: pairs = (l.strip().split(maxsplit=1) for l in f.readlines()) labels = dict((int(k), v) for k, v in pairs) interpreter = common.make_interpreter(args.model) interpreter.allocate_tensors() #/_________________________________________________________________ # Main cap = cv2.VideoCapture(args.camera_idx) window.mainloop()
common.py
# Copyright 2019 Google LLC # # Licensed under the Apache License, Version 2.0 (the "License"); # you may not use this file except in compliance with the License. # You may obtain a copy of the License at # # https://www.apache.org/licenses/LICENSE-2.0 # # Unless required by applicable law or agreed to in writing, software # distributed under the License is distributed on an "AS IS" BASIS, # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. # See the License for the specific language governing permissions and # limitations under the License. """Common utilities.""" import numpy as np import tflite_runtime.interpreter as tflite EDGETPU_SHARED_LIB = 'libedgetpu.so.1' def make_interpreter(model_file): model_file, *device = model_file.split('@') return tflite.Interpreter( model_path=model_file, experimental_delegates=[ tflite.load_delegate(EDGETPU_SHARED_LIB, {'device': device[0]} if device else {}) ]) def input_image_size(interpreter): """Returns input image size as (width, height, channels) tuple.""" _, height, width, channels = interpreter.get_input_details()[0]['shape'] return width, height, channels def input_tensor(interpreter): """Returns input tensor view as numpy array of shape (height, width, 3).""" tensor_index = interpreter.get_input_details()[0]['index'] return interpreter.tensor(tensor_index)()[0] def output_tensor(interpreter, i): """Returns dequantized output tensor if quantized before.""" output_details = interpreter.get_output_details()[i] output_data = np.squeeze(interpreter.tensor(output_details['index'])()) if 'quantization' not in output_details: return output_data scale, zero_point = output_details['quantization'] if scale == 0: return output_data - zero_point return scale * (output_data - zero_point)
install_requirements.sh
#!/bin/bash # # Copyright 2019 Google LLC # # Licensed under the Apache License, Version 2.0 (the "License"); # you may not use this file except in compliance with the License. # You may obtain a copy of the License at # # https://www.apache.org/licenses/LICENSE-2.0 # # Unless required by applicable law or agreed to in writing, software # distributed under the License is distributed on an "AS IS" BASIS, # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. # See the License for the specific language governing permissions and # limitations under the License. if grep -s -q "MX8MQ" /sys/firmware/devicetree/base/model; then MENDEL_VER="$(cat /etc/mendel_version)" if [[ "$MENDEL_VER" == "1.0" || "$MENDEL_VER" == "2.0" || "$MENDEL_VER" == "3.0" ]]; then echo "Your version of Mendel is not compatible with OpenCV." echo "You must upgrade to Mendel 4.0 or higher." exit 1 fi sudo apt install python3-opencv elif grep -s -q "Raspberry Pi" /sys/firmware/devicetree/base/model; then RASPBIAN=$(grep VERSION_ID /etc/os-release | sed 's/VERSION_ID="\([0-9]\+\)"/\1/') echo "Raspbian Version: $RASPBIAN" if [[ "$RASPBIAN" -ge "10" ]]; then # Lock to version due to bug: https://github.com/piwheels/packages/issues/59 sudo pip3 install opencv-contrib-python==4.1.0.25 sudo apt-get -y install libjasper1 libhdf5-1* libqtgui4 libatlas-base-dev libqt4-test else echo "For Raspbian versions older than Buster (10) you have to build OpenCV yourself" echo "or install the unofficial opencv-contrib-python package." exit 1 fi else sudo apt install python3-opencv fi
CustomCableModel
Installing Tensorflow Lite into Raspberry Pi:
Overview of 5-step process:
- Update the Raspberry Pi
- Download this repository and create virtual environment
- Install TensorFlow and OpenCV
- Set up TensorFlow Lite detection model
- Run TensorFlow Lite model
Step 1a. Update the Raspberry Pi:
- Into terminal, copy the following:
sudo apt-get update
sudo apt-get dist-upgrade
Step 1b. Make sure you activate Camera Interface:
- Click the Pi icon in the top left corner of the screen, → "Preferences" → "Raspberry Pi Configuration" → "Camera Enabled" → click "OK"
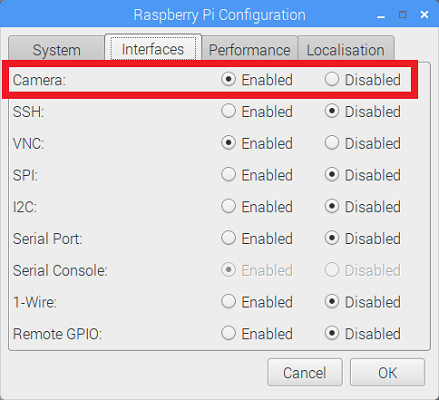
- Reboot system.
Step 2. Download this repository and create virtual environment:
- Clone the repository to your raspberry Pi
git clone https://github.com/EdjeElectronics/TensorFlow-Lite-Object-Detection-on-Android-and-Raspberry-Pi.git
- Go to the folder:
cd TensorFlow-Lite-Object-Detection-on-Android-and-Raspberry-Pi.git
- Install
virtualenvpackage:sudo pip3 install virtualenv
- Create Python3 new virtual environment:
python3 -m venv tflite1-env
- Activate virtual environment:
source tflite1-env/bin/activate
Step 3. Install TensorFlow Lite dependencies and OpenCV:
- Run following bash script:
bash get_pi_requirements.shtakes around 5 minutes..
Step 4. Set up TensorFlow Lite detection model:
- Download sample SSDLite-MobileNet-v2:
wget https://storage.googleapis.com/download.tensorflow.org/models/tflite/coco_ssd_mobilenet_v1_1.0_quant_2018_06_29.zip
- Unzip to a folder called "Sample_TFLite_model":
unzip coco_ssd_mobilenet_v1_1.0_quant_2018_06_29.zip -d Sample_TFLite_model
Step 5. Run the TensorFlow Lite model:
- Execute the following bash script:
python3 TFLite_detection_webcam.py --modeldir=Sample_TFLite_model
Using Edge TPU Object Detection Models with Coral USB Accelerator:
Overview of 5-step process:
- Activate virtual environment
- Add Coral package to distribution list
- Install libedgetpu library
- Set up Google's EdgeTPU model
- Connect Coral USB Accelerator
- Run detection with EdgeTPU
Step 0. Coral USB Accelerator is disconnected.
Step 1. Activate existing virtual environment:
cd TensorFlow-Lite-Object-Detection-on-Android-and-Raspberry-Pi
source tflite1-env/bin/activate
Step 2. Add the Coral package repository to your apt-get distribution list:
echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list
curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -
sudo apt-get update
Step 3. Install the libedgetpu library:
sudo apt-get install libedgetpu1-stdStep 4. Set up Google's sample EdgeTPU model:
wget https://dl.google.com/coral/canned_models/mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite
mv mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite Sample_TFLite_model/edgetpu.tflite
Step 5. Connect USB Accelerator to Raspberry Pi.
Step 6. Run detection with Edge TPU:
python3 TFLite_detection_webcam.py --modeldir=Sample_TFLite_model --edgetpu